
日野市大学の魅力PRレポート 明星大学:山崎 芳昭
研究室概要
- 研究者
- 山崎 芳昭
- 大学名・職位
- 明星大学・教授
- 住所
- 〒191-8506 東京都日野市程久保 2-1-1
- 研究領域
- ロボティクス・メカトロニクス
- 研究キーワード
-
レスキューロボット、ROS を利用したロボット制御、
Deep Learning による物体認識
- 窓口担当
- 研究支援チーム
- 電話
- 042-591-5094
- ファクス
- 042-591-5644
- メール
- chizai@gad.meisei-u.ac.jp
技術PR事項
遠隔操縦や自律移動できるロボットの開発とAI 応用研究
1.概要
本研究室では、遠隔操縦型ロボットや自律移動ロボットの研究、近年ではAIによる物体認識の応用研究やマルチコプター型ドローンの自律制御に取り組んでいます。
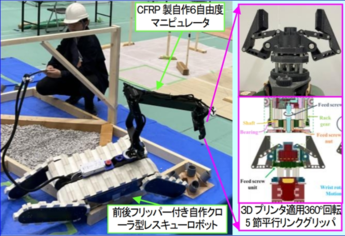
1.遠隔操縦型レスキューロボットの開発
震災時にプラント災害や被災者発見に活用するレスキューロボットを開発し、「ロボカップ レスキュー実機リーグ」や経産省共催の「WRS2025ワールドロボットサミット」で国内外の大学などと実験評価しています(図1参照)。
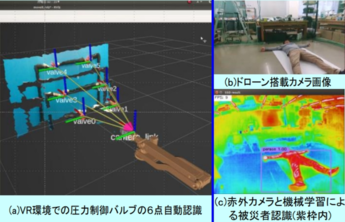
2.AIと画像認識技術を用いたバルブや被災者の自動認識
被災者やバルブ画像を機械学習させ、マニピュレータ搭載の深度カメラで認識し、距離や位置も自動計測する手法を研究しています(図2参照)。
3.レスキューロボット搭載用自律マニピュレータの研究
ROS(Robot Operating System)とMoveIt!を組み合わせ、バルブの自動開閉を実現しています。(代表論文参照)
2.希望する連携内容(共同研究、試作品作りなど)と相談に対応できる技術分野
- 各種ロボットの技術開発(レスキューロボット、マニピュレータ、自律移動ロボット、AI応用画像認識など)
- エレベーターなどの各種振動問題に関する技術相談(メーカー勤務時に研究開発に従事)
特記事項
代表論文
- H.HAGIWARA, and Y.YAMAZAKI,"Autonomous valve operation by a manipulator using a monocular camera and a single shot multibox detector", The IEEE International Conference on Safety, Security, and Rescue Roboticss (SSRR2019), Wurzburg,0055_FI_pp.1-6, September, 2019.
- J.SEO, and Y.YAMAZAKI,” Design of a robotic gripper with two servo motors for infinite wrist rotation and performance evaluation for valve operation”, Proceedings of AROB 30th 2025, p.960-965, Jan, 2025.
Adobe Readerのご案内
PDFファイルをご覧いただくには、「Adobe(R) Reader(R)」が必要です。お持ちでない方はアドビシステムズ社のホームページ(新しいウィンドウ)からダウンロード(無料)してください。
プリントサービスのご案内
ご自宅にプリンタなどの印刷機器をお持ちでない方は、お近くのコンビニエンスストアなどのプリントサービスを利用して申請書等を印刷することができます。詳細はプリントサービスのご案内ページをご覧ください。
このページに関するお問い合わせ
産業スポーツ部 産業振興課 ものづくり推進係
直通電話:042-514-8442
代表電話:042-585-1111
ファクス:042-581-2516
〒191-8686東京都日野市神明1丁目12番地の1 日野市役所3階
産業スポーツ部産業振興課へのお問い合わせは専用フォームをご利用ください。